| 事例名称 |
ACサーボモータでチェーン駆動した旋回テーブルがハンチングした |
| 代表図 |
|
| 事例概要 |
旋回テーブルをACサーボモータでチェーン駆動したら、旋回テーブルがハンチングした。サーボモータは、フィードバック制御であり、加減速時にも制御量を目標値に追従させるように動作する。旋回テーブルの回転慣性が大きいのに、チェーンテンショナ部のガタやチェーン自体のたわみが大きく、動作信号に対する応答が不安定となったためである。対策として、ACモータをサーボのないタイプに変更した。 |
| 事象 |
旋回テーブルをACサーボモータでチェーン駆動したら、旋回テーブルがハンチングした。 |
| 経過 |
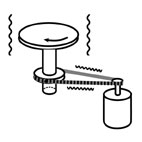
旋回テーブルを設計した。図1のように駆動源はACサーボモータ、回転の伝達にチェーンを選択した。運転を開始したところ、旋回テーブルがハンチングする不具合が発生した。 |
| 原因 |
サーボモータは、フィードバック制御であり、加減速時にも制御量を目標値に追従させるように動作する。旋回テーブルの回転慣性が大きいのに、チェーンテンショナ部のガタやチェーン自体のたわみが大きく、動作信号に対する応答が不安定となった。 |
| 対策 |
旋回テーブルの位置制御が不要だったので、ACモータをサーボのないタイプに変更した。 |
| 知識化 |
安易にサーボモータを選択しがちだが、位置制御や厳密な速度制御を必要としない場合は、サーボを使用しない方がよい。 |
| 背景 |
ハンチングとは、スティックスリップをするようにガタガタと起動・停止を繰り返すことである。 |
| シナリオ |
| 主シナリオ
|
調査・検討の不足、事前検討不足、審査・見直し不足、誤判断、誤った理解、概念立案ミス、不良現象、機械現象、部品リスト、チェーン、初期伸び、相互運動部、組合不良、振動
|
|
| 情報源 |
創造設計エンジンDB
|
| マルチメディアファイル |
図1.旋回テーブル駆動装置
|
| 分野 |
機械
|
| データ作成者 |
張田吉昭 (有限会社フローネット)
|